
| Project:
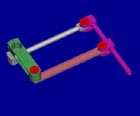
Complete design of a 2 DOF miniature robot/manipulandum for use in rat and frog motor function experiments. Supervisors: Prof. Neville Hogan, Dr. Michel Lemay. |
 |
 |
 |
 |
 |
 |
 |
 |
 |
Design Specifications:
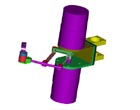
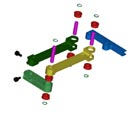
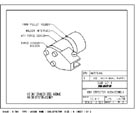
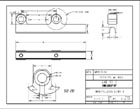
SCARA-type with 2 degrees of freedom Kollmorgen 1210-series brushless motors. ATI 6-axis force sensor
The manipulator designed in this project is intended to be used as a haptic interface for biomedical experiments focusing on limb dynamics. Its future uses will range from field mapping to quantifying effects of new pharmaceuticals. I started with the project at its inception in the summer of 1996, and have designed and manufactured all custom mechanical components. I was also involved in all other phases of the prototype development, including the control system layout and limited programming. I completed the building of the newest prototype in the late summer of 1997. That particular model is currently involved in heavy experimental work at the Massachusetts General Hospital. |
